概述
一个Timer的实现需要具备以下几个行为:
- StartTimer(Interval, ExpiryAction)
注册一个时间间隔为 Interval 后执行 ExpiryAction 的定时器实例,其中,返回 TimerId 以区分在定时器系统中的其他定时器实例。
- StopTimer(TimerId)
根据 TimerId 找到注册的定时器实例并执行 Stop 。
- PerTickBookkeeping()
在一个 Tick 时间粒度内,定时器系统需要执行的动作,它最主要的行为,就是检查定时器系统中,是否有定时器实例已经到期。
具体的代码实现思路就是:在StartTimer的时候,把 当前时间 + Interval 作为key放入一个容器,然后在Loop的每次Tick里,从容器里面选出一个最小的key与当前时间比较,如果key小于当前时间,则这个key代表的timer就是expired,需要执行它的ExpiryAction(一般为回调)。
链表的实现
- 精度是 1ms
- 最长时间是10min,延长时间可以增加 slot数量,slot时间的间隔是 1ms
- 通过继承Timer父类,在子类重写timeout实现 超时回调
- 每次都需要遍历超过时间的所有链表,时间复杂度为O(n)
执行方式
每次从上次执行的时间,遍历每个链表上挂的timer是不是到期,如果到期了,就执行对应的超时函数,并移除定时器,把这个环拉直看就可以了: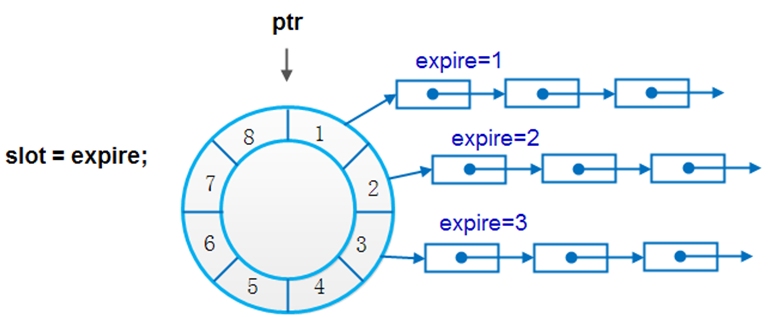
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46int TimerMgr::TimeRun()
{
Tick();
int timeout_count = 0;
int pass = currTime - lastRunTime;
uint64_t time = lastRunTime + 1;
for (int i = 0; i < pass; i++)
{
int index = time % timeLen;
while(slot[index]->Size() > 0)
{
TimerNode* node = slot[index]->Serve();
TimerNodeMap::iterator it;
it = nodemap.find(node->t->getId());
if (it != nodemap.end())
{
if (node == NULL)
{
ERROR("node == NULL");
continue;
}
if (node->t == NULL)
{
ERROR("timer == NULL");
continue;
}
DEBUG("time out %d", index);
node->t->Timeout();
nodemap.erase(node->t->getId());
timeout_count++;
}
TimerPool.Free(reinterpret_cast<char*>(node->t));
NodePool.Free(reinterpret_cast<char*>(node));
}
time++;
}
lastRunTime = currTime;
return timeout_count;
}
example
子类:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47template<class T>
class RobotTimer:public Timer
{
typedef void (T::*Method)();
public:
RobotTimer(T * p, Method m):method(m),pRobot(p){}
virtual void Timeout();
private:
Method method;
T* pRobot;
};
template<class T>
void RobotTimer<T>::Timeout()
{
(pRobot->*method)();
}
class BaseRobot
{
public:
BaseRobot()
{
m_id = 0;
}
void RobotWait(int millseconds);
void Resume()
{
cout<< "BaseRobot::Resume" << endl;
TimerMgr::GetInst()->RemoveTimer(m_id);
cout << "RemoveTimer"<< m_id << endl;
}
uint32_t m_id;
};
void BaseRobot::RobotWait(int millseconds)
{
RobotTimer<BaseRobot>* t = reinterpret_cast<RobotTimer<BaseRobot>*>(TimerMgr::GetInst()->TimerPool.Alloc());
new (t) RobotTimer<BaseRobot>(this, &BaseRobot::Resume);
t->SetTimer(millseconds);
uint32_t tid = t->getId();
TimerMgr::GetInst()->Insert(t);
m_id = tid;
}
等待一段时间:
1 | ... |
